
The Precision Motion and Intelligent Robotics Technology Group from the Ningbo Institute of Materials Technology and Engineering (NIMTE) of the Chinese Academy of Sciences, has proposed a novel method for efficient dynamics modeling of industrial robots, addressing long-standing challenges in real-time torque computation.
The study was published in IEEE Transactions on Industrial Informatics.
The linear-in-parameter (LIP) dynamic model for industrial robots enables torque computation and online identification of dynamic parameters, making it widely applicable in adaptive control and robot-environment interaction.
However, LIP dynamic models often struggle with redundant terms in multivariate polynomials (MVPs), which hinder torque computation efficiency and real-time applications.
Researchers at NIMTE have introduced an innovative solution known as the linear-in-multivariate-polynomials (LI-MVP) dynamics model. This approach streamlines the process by encoding coefficients and polynomial degrees into a numeric matrix, thus significantly enhancing efficiency in dynamic modeling for industrial robots.
A binary operation defined within a monoid replaces the tedious symbolic Kronecker product, speeding up the derivation of the LI-MVP model in encoded space.
“Our method not only simplifies the model derivation process but also speeds up real-time torque computation by concurrently eliminating redundant MVPs and parameters,” explained Prof. CHEN Silu, the study’s corresponding author.
The final symbolic LIP model is restored with decoded MVPs in Horner form, reducing the number of multiplications during torque computation.
Quantitative analysis confirms the proposed method’s advantages in efficient model derivation compared to existing methods, as well as its real-time model-based control capability for industrial robots. This advancement paves the way for more agile and responsive robotic systems.
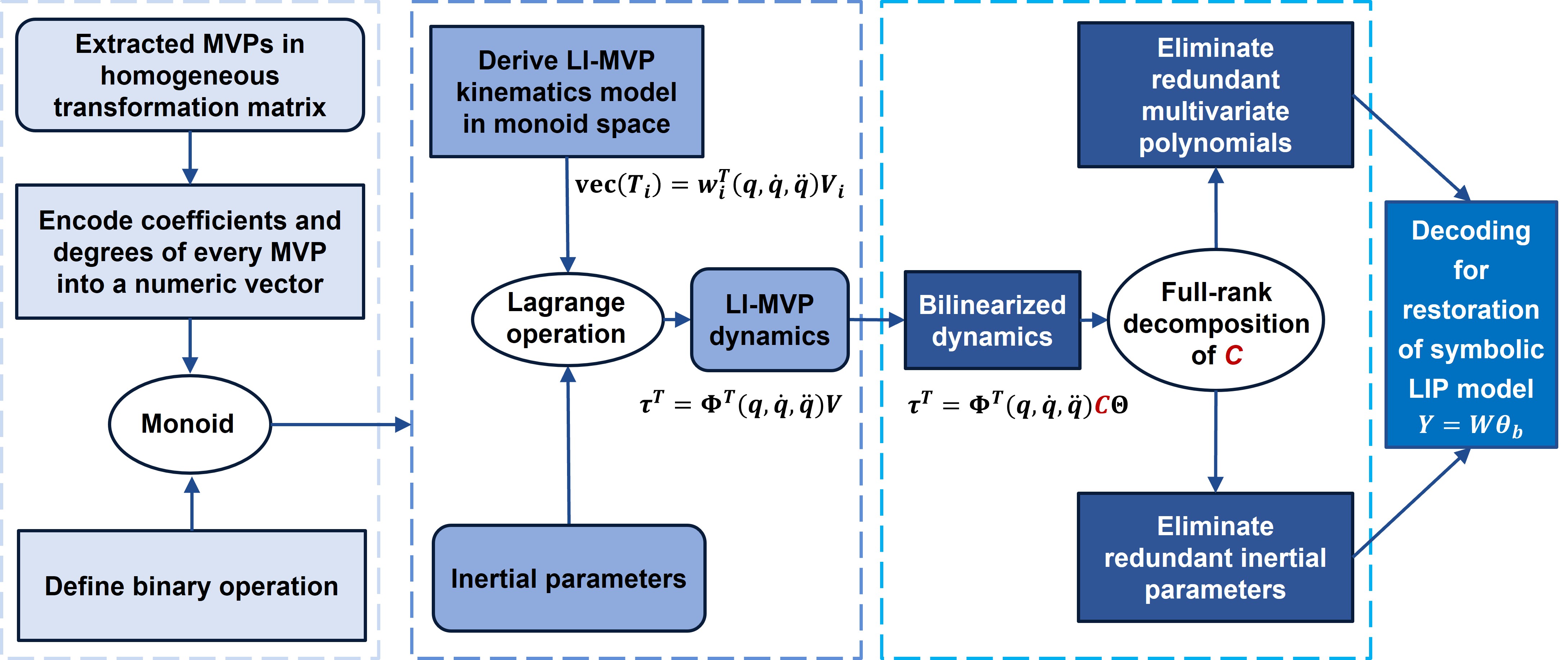
The proposed efficient dynamics modeling of industrial robots (Image by NIMTE)
Contact
CHEN Silu
Ningbo Institute of Materials Technology and Engineering
E-mail: chensilu@nimte.ac.cn