
The differential geometry was employed in previous studies to depict the finite and instantaneous motions of rigid bodies. The product of exponential (POE) formula based on the differential geometry has been developed to describe the kinematics of the articulated robots. This model can avoid model singularities more efficiently and improve the robustness of parameter identification, compared to traditional methods based on Denavit-Hartenberg conventions.
However, the homogeneous transformation matrix (HTM) was still employed in such models to describe the pose of a rigid body, which resulted in deficiencies such as excessive entries within data structure and large computation intensity. In addition, the repeated data dispatch and concatenation are required when invoking HTMs in computers, further slowing the process speed. Therefore, it is imperative to adopt new data structures to improve the calibration and programming efficiency of robots when executing a long sequence of trajectories.
In the study published in IEEE Transactions on Industrial Informatics, a kinematic calibration method with unit dual quaternion (UDQ) as the basic data structure has been proposed by scientists from the Ningbo Institute of Materials Technology and Engineering (NIMTE)of the Chinese Academy of Sciences (CAS).
The UDQ was employed to describe the pose of a rigid body, which significantly reduced the number of entries compared to the method based on the 4x4 HTM. The explicit exponential and logarithm mappings, as well as the adjoint operation for UDQs were defined, so that the mapping between finite and instantaneous motions and the propagation of kinematic errors over an articulated robot were revealed with the POE formula.
Through analysis and quantitative evaluation, it was demonstrated that the UDQ-based model can effectively reduce the number of arithmetic operations in the calibration process compared with the traditional ones based on the HTM. Moreover, since UDQ is in a vector-based data structure, it can avoid the data dispatch and concatenation during the execution of the program, thus improving the efficiency in the error compensation process.
For different kinds of articulated robots, the proposed method can save computation time ranging from 25% to 30% in the error compensation process, which plays a crucial role in efficient and accurate programming of robots.
This work was supported by the National Natural Science Foundation of China (Nos. U20A20282, U22A20177, U1813223), Zhejiang "Lead Goose" Plan (No. 2022C01114) and the special project of "global common challenges" by Bureau of International Collaboration, CAS (No. 174433KYSB20210060).
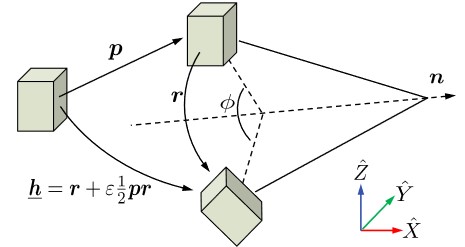
Fig. The unit dual quaternion for describing the pose of a rigid body (Image by NIMTE)
Contact
CHEN Silu
Ningbo Institute of Materials Technology and Engineering
E-mail: chensilu@nimte.ac.cn